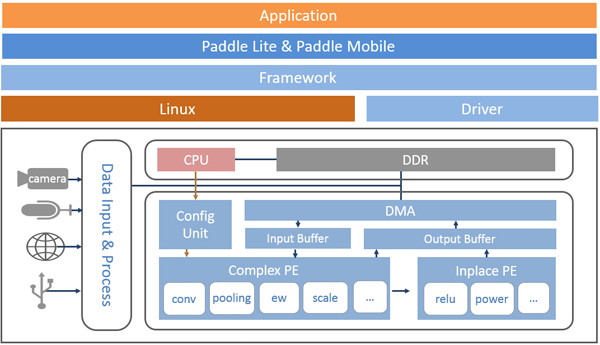
FZ3 Card is a deep learning accelerator card launched by MYIR while cooperating with Baidu. It is
based on Xilinx
Zynq UltraScale+ ZU3EG MPSoC which integrates 64-bit quad-core ARM Cortex-A53, GPU and FPGA, thus comes with
multi-core processing capability, FPGA programmable capability and hardware
decoding capability for video stream.

The FZ3 Card has built-in
deep learning soft core based on Linux OS and Baidu PaddlePaddle deep learning AI (Artificial Intelligence) framework which is fully compatible to use Baidu Brain’s
model resources and AI development tools like EasyDL, AI Studio and EasyEdge to enable developers and engineers to quickly train-deploy-reasoning models. Provided
with these hardware capabilities and software resources, the FZ3 Card reduces the threshold of development
validation, product integration, scientific research and teaching significantly.
How to build your applications with FZ3 Card and Baidu Brain PaddlePaddle? Below there are some guidances.
1. Obtaining models
Currently Paddle-Mobile only supports
Paddle trained models. If the models in your hands are different types of
models, you need to perform model conversion before running. Verified networks
include resnet, Inception, ssd, mobilenet, etc.
1.1 Training model
If you don't have a model, you can use the model in
sample or train the model by yourself.
1. Train model through Paddlepaddle open source
deep learning framework. Reference for
detailed use: PaddlePaddle
2. Through model
through AI studio platform training model, reference for detailed use: AI Studio
3. You may upload labeled data on EasyDL platform
to train the model. Reference for detailed
use: EasyDL
1.2 Converting model
1. If you already have a Caffe model, MYIR
provides a corresponding conversion tool to help you convert it to a Paddle
model. Reference
for detailed use: X2Paddle_caffe2fluid
2. If you already have a TensorFlow model,
MYIR provides a corresponding conversion tool to help you convert it to a
Paddle model. Reference
for detailed use: X2Paddle_tensorflow2fluid
2. Connecting video
data source
2.1 Video data input
via USB protocol video
You can choose the UVC
USB camera as the video source. Insert USB camera into USB interface of FZ3.
2.2 Video data input
via BT1120 protocol
You can select the
webcam with BT1120 video data output from Hisilicon. Connect the BT1120
interface of FZ3 through FPC cable. For the specific pin-description, please
refer to the hardware description.
2.3 Video data input
via Mipi protocol
You can choose a
suitable Mipi camera as the video source and connect to the Mipi interface of
FZ3 through FPC.
2.4 Video data input
via GigE protocol
You can choose the GIGE
camera that supports the Linux system, and contact our company to adapt the official
SDK of the camera. The hardware is connected to the FZ3 network port.
3. Load device
driver
Using FZ3's acceleration function,
the prediction library will calculate the op with a large amount of calculation
through the driver to call
FPGA to calculate. The driver needs to be loaded
before running your own application. The compiled driver is in the directory
/home/root/workspace/driver, providing two versions: the first version with no
log output and the second version with log output.
Load driver
insmod /home/root/workspace/driver/fpgadrv.ko
Uninstall driver (In normal circumstances, you don’t need to
uninstall the driver. If you need to load the version with log output, you can
uninstall it with the following command and then load this version)
rmmod /home/root/workspace/driver/fpgadrv.ko
Set the driver to be automatically loaded
1) Add a self-starting script to the system
// Open the startup directory
cd /etc/init.d/
// Create a new startup script and edit it, the name can
be customized
vim eb.sh
Script content
chmod +x /home/root/workspace/driver/fpgadrv.ko
insmod /home/root/workspace/driver/fpgadrv.ko
2) Establish soft links
cd /etc/rc5.d/
ln -s /etc/init.d/eb.sh S99eb
3) Change script permissions
chmod +x /etc/init.d/eb.sh
reboot
4. Using the prediction library
FZ3 supports Paddle-Moblie prediction library. The compiled
prediction library is in
/home/root/workspace/paddle-mobile.
How to
use it: Copy the header file and dynamic library of the prediction library to
your own application. You can also refer to the sample MYIR provides.
Paddle-Moblie
source code: https://github.com/PaddlePaddle/paddle-mobile
5. Create applications
5.1 Add prediction
library
Copy
the dynamic libraries and header files in /home/root/workspace/paddle-mobilie/
to your project. Add a reference to the Paddle-Mobile library in CmakeLists.txt
set(PADDLE_LIB_DIR "${PROJECT_SOURCE_DIR}/lib" )
set(PADDLE_INCLUDE_DIR
"${PROJECT_SOURCE_DIR}/include/paddle-mobile/" )
include_directories(${PADDLE_INCLUDE_DIR}) LINK_DIRECTORIES(${PADDLE_LIB_DIR})
...
target_link_libraries(${APP_NAME} paddle-mobile)
5.2 Add model
Copy
your trained model to your project.
5.3 Add prediction data sources
You can select pictures
and camera data as the source of prediction data. To use the camera, you need
to insert the corresponding camera.
5.3.1 USB camera
1) After plugging in the camera, check the
device access through ls /dev/video*. Display as below means pass:
config.dev_name = "/dev/video2";
/dev/video2 outputs YUV data for USB camera. When
the application prompts that the device cannot be found, you can modify
src/video_classify.cpp or src/video_detection.cpp. Check the camera
connectivity through the video tool in /home/root/workspace/tools.
// src/video_classify.cpp line 169
config.dev_name = "/dev/video2";
2) The camera resolution can be modified
// src/video_classify.cpp line 170
config.width = 1280;
config.height = 720;
3) Run the video tool
// Read the USB camera data, collect a picture and save it
to the local
cd /home/root/workspace/tools/video
./v4l2demo -i /dev/video2 -j -n 1
// If in doubt, check the help
./v4l2demo
-h
After executing the program, a .jpg file will be generated in the
directory build, you can check whether the picture is correct or not. If no
picture is generated, please check if the USB device is recognized.
5.3.2 BT1120 ipc camera
After FZ3 receives the original data through BT1120 protocol and
reasonig, it can transmit the result back to ipc through the serial port or spi
(For interface description of BT1120, serial port, spi please refer to the
hardware description). The frame number of the image can be carried in the
pixel data.
After inserting the camera, use the video tool in
/home/root/workspace/tools to check the camera connectivity.
1) View the device, the directory is /dev/video1 in
normal circumstances
ls /dev/video*
/dev/video0 /dev/video1
2) Set the camera parameters
media-ctl -v --set-format '"a0010000.v_tpg":0
[RBG24 1920x1080 field:none]'
3) Run the video tool
// Read BT1120 camera data, collect a picture and save to
local
cd /home/root/workspace/tools/video
./v4l2demo -i /dev/video1 -j -n 1
// If in doubt, check the help
./v4l2demo -h
After executing the program, a .jpg file will be generated in the
directory build, you can check if the picture is correct. If no picture is
generated, check whether the BT1120 cable is connected correctly.
5.4 Call the prediction
library to load the model and use the prediction data
5.4.1 Initialize the model
Predictor _predictor_handle = new Predictor();
_predictor_handle->init(model, {batchNum, channel,
input_height, input_width}, output_names);
5.4.2 Prepare data
1) Scale the picture to the specified size. If the
neural network requires a fixed size, the picture needs to be scaled to that
fixed size.
2) Image preprocessing (Minus mean value, floating
point conversion, normalization, etc.).
3) Output data. Because FZ3 uses NHWC format,
usually the data from the video is in NHWC format, so NHWC->NCHW conversion
is not required.
5.4.3 Predict data
bool predict(const float* inputs, vector
&outputs,vector&output_shapes);
Do you have
any idea to use MYIR’s FZ3 Card with Baidu Paddle to build your applications
now? Some typical applications are as below for reference.

Please get
more information about the FZ3
Card from MYIR’s website:
http://www.myirtech.com/list.asp?id=630
About
MYIR
MYIR Tech Limited is a global provider of ARM hardware and software
tools, design solutions for embedded applications. We support our customers in
a wide range of services to accelerate your pace from project to market.
We sell products ranging from board level products such as development
boards, single board computers and CPU modules to help with your evaluation,
prototype, and system integration or creating your own applications. MYIR also
provide our customers charging pile billing control units, charging control
boards and relative solutions inside of China. Our products are used widely in
industrial control, medical devices, consumer electronic, telecommunication
systems, Human Machine Interface (HMI) and more other embedded applications.
MYIR has an experienced team and provides custom services based on many
processors (especially ARM processors) to help customers make your idea a
reality.
More information about MYIR can be found at: www.myirtech.com
|



